
Hace unos días acudí en representación de km77 al evento Škoda 4×4 Winter Experience 2018. Tuvo lugar en Rovaniemi, Finlandia, en una instalación con pequeños circuitos llamada Lapland Driving. Fue una única jornada, en la que temperatura subió desde los -23 ºC de la mañana a los -12 ºC de la tarde. No se veía asfalto por ningún lado, todo estaba cubierto por una profunda capa de nieve sobre la que hicimos diversas actividades con los modelos con tracción a las cuatro ruedas que actualmente comercializa el fabricante de origen checo.
Sin embargo, antes de entrar a explicar cada una de estas actividades, haré una breve contextualización histórica e informativa de Škoda y su relación con los sistemas de tracción total.
Este era el punto de reunión en el circuito Lapland Driving. Aquí cogíamos los coches e íbamos a realizar la actividad que nos tocase en cada momento.

Škoda comenzó a experimentar con los sistemas de tracción a más de un eje en la década de 1930. Su primera incursión en este área se materializó en forma de varios prototipos de un vehículo con aspecto de pequeño autobús. Tenía tres ejes de ruedas, dos de ellos con tracción, lo que sería un 6×4. Este proyecto nunca llegó a la fase de producción.
Škoda Type 903 de finales de la década de 1930. Tiene tres ejes y seis ruedas, cuatro de ellas con tracción. Su motor era de gasolina, de seis cilindros y daba 61 CV.

En 1936 el ejercito checo sacó a concurso la creación de un vehículo destinado al uso de oficiales de alto rango. Škoda participó desarrollando el prototipo Type 903, del que fabricó tres unidades. Basado en el vehículo de pasajeros Škoda 650, tenía tres ejes de ruedas, dos de ellos con tracción y el motor era de gasolina, con seis cilindros, tres litros de cilindrada y 61 CV.
Entre 1939 y 1942 Škoda produjo 42 unidades del 903. Había dos variantes, una con seis asientos, cuatro puertas y un techo de lona que se podía retirar; y la otra, con una carrocería completamente abierta y con unas banquetas colocadas longitudinalmente a la marcha en la que se podían sentar hasta 8 personas.
El Škoda Type 903 en pleno cruce de ejes, de los dos traseros, porque hay otro más delante.

En 1952, Škoda creó el prototipo Type 973, un vehículo con orientación militar de cuatro ruedas motrices en el que el usuario podía desacoplar a voluntad el eje delantero de ruedas. Entre sus capacidades como todoterreno estaban poder subir pendientes de hasta el 58 % de inclinación, superar obstáculos de hasta 0,25 metros de altura y una profundidad de vadeo de 60 centímetros. Škoda produjo unas 30 unidades para ser probadas por los miembros de la alianza militar del Pacto de Varsovia, los cuales finalmente se decantaron por el modelo ruso GAZ-69.
Durante los siguientes años Škoda desarrolló algunos modelos con tracción total destinados a uso agrario, como el Type 998 y el Type 990, pero ninguno llegó a adquirir una relevancia reseñable.
Škoda Octavia Combi 4×4 de 1999. El primer Škoda moderno con tracción a las cuatro ruedas.

En 1999, como parte integrante del grupo Volkswagen, Škoda lanza al mercado el Octavia Combi 4×4, su primer vehículo moderno con tracción total. Ahora, en 2018, son cuatro los modelos de Škoda que pueden llevar un sistema de tracción de este tipo. Hay dos berlinas —Octavia y Superb— y dos todoterrenos —Karoq y Kodiaq—. Están disponibles tanto con motores de gasolina como Diesel y con cambio manual y automático. En este listado se ven todas ellas ordenadas en orden ascendente según su precio.
En 2017, Škoda produjo 127 150 vehículos con tracción total, de los cuales un 47 % fueron Kodiaq y un 23 % Yeti (modelo que fue sustituido en septiembre de 2017 por el Karoq). Los tres mercados que más ventas acumulan son, por este orden, Alemania (27 000 unidades), República Checa (14 700 ud) y Suiza (9300 ud). España, con unas 1500 ud, está fuera del «Top Ten». Desde el lanzamiento en 1999 del Octavia Combi 4×4, Škoda ha producido más de 700 000 unidades 4×4.
Modelos 4×4 de Škoda, de izquierda a derecha: Kodiaq, Karoq, Superb y Octavia.

Todos los Škoda 4×4 actuales tienen un sistema de tracción de tipo conectable automáticamente. En este sistema, una unidad electrónica de gestión (ECU) controla continuamente el reparto de par entre ambos ejes de ruedas en base a la información que recibe de los diversos sensores del vehículo (como el del ABS y el de los acelerómetros) y de otros aspectos como los grados de giro de volante o la demanda de aceleración. Si la ECU interpreta que no hay riesgo de pérdida de adherencia, envía toda la fuerza del motor al eje delantero con el fin de disminuir el gasto de carburante por pérdidas de fricción. Si por el contrario detecta un riesgo, en función de la importancia de este, envía una cantidad variable de par hacia el eje trasero.
Radiografía de un Škoda Karoq, en la que se destaca en verde la caja de cambios y el diferencial frontal (en la parte delantera), el eje de transmisión y el embrague multidisco y el diferencial posterior (en la parte trasera).

El dispositivo que acopla el eje trasero al delantero es un embrague multidisco (de tipo Haldex de 5ª generación y está colocado en el eje posterior, junto con el diferencial trasero). El diferencial trasero, como el delantero, tiene un sistema electrónico de bloqueo (llamado EDL) que actúa a baja velocidad y cuando detecta que hay diferencia de velocidad de rotación entre las ruedas de un mismo eje, aplica freno sobre la que gira más rápido y desvía más par hacia la que va más lenta, que es la que supuestamente tiene más adherencia. Además, hay un sistema llamado XDS+, cuyo objetivo es simular el efecto de un diferencial de deslizamiento limitado. Actúa en las curvas, frenando la rueda interior al giro para prevenir que esta derrape.
Con este sistema de tracción y los controles electrónicos descritos en el párrafo anterior, un Škoda 4×4 puede circular con el 100 % de la potencia del motor moviendo únicamente las ruedas delanteras y, en casos extremos, con un 10 % delante y un 90 % detrás. También puede darse la situación en la que tres ruedas reciban un 5 % de par cada una y la cuarta el 85 % restante. El tiempo de actuación del embrague multidisco es del orden de milisegundos.
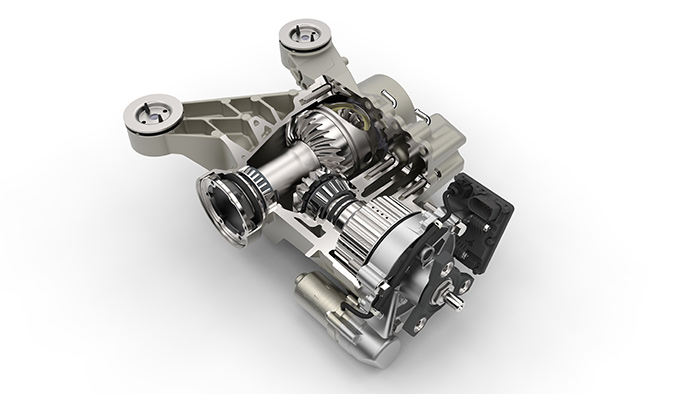
Detalle de la carcasa en la que se aloja el embrague multidisco (en la parte inferior derecha de la imagen) y el diferencial posterior (el juego de engranajes transversal al eje del embrague).
Las leyes por las que se rige la unidad de control del sistema de tracción total cambian según el programa de conducción elegido (algunos de los disponibles son Eco, Normal, Sport y Snow). En el Karoq y el Kodiaq hay además un programa llamado Off-Road, que solo puede activarse a velocidades de hasta 30 km/h.
Todos los vehículos que utilizamos en la Škoda 4×4 Winter Experience 2018 tenían neumáticos con clavos de 2 milímetros. La marca de estos era Nokian y había dos modelos Hakkapeliitta 8 y Hakkapeliitta 9.
Detalle de la banda de rodadura de unos Nokian Hakkapeliitta 8 con clavos de 2 mm en un Škoda Octavia Combi 4×4.

El día comenzó conduciendo del hotel al circuito. Había un trecho de unos 10 kilómetros y elegí un Karoq. Moverse sobre la nieve con neumáticos de clavos no exige ninguna habilidad especial. Con ellos se conduce con total normalidad y con sensación de seguridad, casi como si se estuviera sobre asfalto seco. Acelerar, frenar, tomar rotondas… todo puede hacerse a una velocidad ágil. Obviamente, el agarre no es equiparable al de unos neumáticos de verano sobre una carretera seca, pero es más que suficiente para que esto no sea una preocupación relevante. Una vez en el circuito, nos explicaron que la actividad consistiría en cuatro módulos, así que voy a empezar por el primero.
Esta es la información que daba el ordenador de viaje del Karoq que conduje del hotel al circuito. La temperatura en ese momento era de -23 ºC.

Módulo I. Utilizamos distintas unidades de Karoq y Kodiaq, todas 4×4, en un circuito de curvas para tratar de sentir las diferencias entre el modo Normal y el Snow. Teóricamente, en el modo Snow la respuesta del motor al acelerador es más suave y la dirección tiene otra calibración. El cambio en el tacto de la dirección sí lo noté con facilidad (se endurecía ligeramente en Snow), el de la respuesta del motor, por el contrario, me fue más difícil de advertir. Puede que me costara porque en el circuito forzaba la entrada en las curvas para ir con el vehículo de costado, o por la alegría de hacer lo que estaba haciendo en ese momento, o por las botas de nieve con las que conducía que me restaban sensibilidad, o por el frío. Sea cual sea el motivo, yo iba constantemente cambiando entre un modo y otro, pero la respuesta del vehículo era prácticamente idéntica. En las condiciones en que hice la prueba, debía de estar muy atento para sentir los cambios y aún así eran minúsculos.
Škoda Karoq con el eje trasero deslizando en el circuito que utilizamos para el Módulo I.

Módulo II. Este fue, para mí, el menos excitante. Estaba dividido en dos partes. La primera consistió en hacer un recorrido a modo de «ruta todoterreno» por una serie de pistas por un bosque, por supuesto todas ellas nevadas. Más allá de una rampa hecha a base de andamios, no hubo nada que pusiera en aprietos a los Kodiaq que utilizamos. Lo único para lo que me sirvió la ruta fue para disfrutar de la vista del bosque nevado por el que transitamos.
Vista desde mi Kodiaq 4×4 del resto de Kodiaq 4×4 que estábamos haciendo en ese momento la ruta todoterreno.

En la segunda parte, dos pilotos profesionales me dieron una vuelta rápida en uno de los muchos circuitos que había disponibles. Los pilotos eran Hans Joachim Stuck —piloto alemán de 67 años que, entre otros méritos, tiene haber participado en 81 Grandes Premios de Formula 1 y lograr dos veces la victoria general en las 24 horas de Le Mans— y Juuso Nordgren —un finlandés de 21 años que este año competirá en la categoría de rally R5 con un Škoda Fabia R5 y cuyo logro más destacable es ser el ganador de la campeonato de rally de Finlandia de 2015—.
Fue curioso observar el distinto estilo de conducción de cada uno. Stuck era más fino, más piloto de asfalto. Poco derrape y movimientos suaves y precisos. Nordgren fue más agresivo, más de ir con el coche cruzado en cuanto fuera posible, más estilo rally. El coche que llevó cada uno era automático, pero mientras Stuck hacia los cambios de manera más sutil con las levas, Nordgren puso la palanca en modo secuencial para arrearla con decisión, como si estuviera manejando el cambio secuencial de su coche de competición.
Este señor se llama Hans Joachim Stuck y algunos de sus logros más destacables son los siguientes: dos victorias absolutas en las 24 horas de Le Mans (1986 y 1987), tres veces campeón de las 24 horas de Nürburgring (1970, 1998 y 2004), subcampeón de la Formula 2 (1974) y 81 participaciones en la Formula 1 (entre 1974 y 1979, su mejor puesto fueron dos terceros lugares).

Módulo III. Para mí, junto con el Módulo IV, el más divertido. De nuevo hubo dos partes. La primera era hacer una carrera de aceleración entre un Superb Combi 4×4 y otro 4×2 y entre un Kodiaq 4×4 y otro 4×2, todos ellos con los mismos neumáticos. Aunque ya intuía los resultados de antemano, hacer una carrera siempre es estimulante. Los modelos de tracción delantera (4×2) no tenían nada que hacer contra los de tracción total (4×4). La capacidad de tracción de estos últimos es mucho más elevada y no hace falta siquiera pisar a fondo el acelerador para dejar clavados a los primeros. Daba igual ir con los controles de tracción desactivados, salir a más o menos revoluciones, cambiar a segunda velocidad lo antes posible… nada de eso hizo que el resultado cambiara.
Drag race! Škoda Superb Combi 4×4 contra Superb Combi 4×2. El color rojo es muy típico de los deportivos, pero no sirve de nada en estas condiciones, sobre todo si eres tracción delantera.

Tras esta prueba fuimos a una especie de súper rotonda de nieve y hielo. Nuestra misión era dar vueltas en ella tratando de mantener el vehículo de lado, derrapando el máximo tiempo posible. Primero probé a hacerlo con los controles activados, por probar, y efectivamente me di cuenta de que eso era perder el tiempo porque estos están permanentemente actuando, disminuyen la aceleración y no dejan descolocar el vehículo.
Škoda Octavia derrapando en la rotonda de hielo y nieve.

Tras esa constatación, desconecté los controles hasta lo máximo permitido. En los Škoda no se pueden desactivar completamente, pero sí lo suficiente para lograr el objetivo de la prueba. ¡Y qué placer da una cosa tan tonta como dar vueltas en círculo! Como todo, hay un pequeño periodo en el que se aprende a dosificar correctamente el giro de volante y la presión sobre el acelerador. El agarre de la pista no era igual a lo largo de la circunferencia, por eso había que ser fino para no pasarse y terminar haciendo una virolla, o bien, quedarse corto y deshacer el derrape. Para esta actividad había dos vehículos disponibles, un Karoq y un Octavia. Curiosamente me resultó más sencillo con el Karoq.
Škoda Kodiaq haciendo lo mismo que el Ocativa de la foto anterior.

Módulo IV. En este utilizamos un circuito distinto al del Módulo I (creo que era el mismo en el que los pilotos nos dieron la vuelta rápida, pero no estoy seguro, para mí todo era blanco). La actividad consistía en, más o menos, aplicar el conocimiento adquirido en el módulo anterior en lo referente al control del derrape sobre la nieve y aprender a ser suaves y certeros a la hora de atacar las curvas para conseguir que el coche sobrevire lo deseado y no terminar con el morro mirando en el sentido contrario. En función de las características de cada curva y de la que venía a continuación, había que atacarlas más abierto o más cerrado, alargando más o menos la frenada y comenzando a acelerar antes o después. Cuando se consigue dominar las reacciones del coche y, especialmente, cuando se consigue enlazar dos curvas seguidas cambiando el derrape del coche de un lado al otro, se siente una satisfacción interior muy grande y es complicado que no se te escape una sonrisilla.
Škoda Superb en color Dragonskin-Gold Metallic derrapando en el circuito del Módulo IV. Si se observa bien, su conductor está sonriendo (a mí también me pasaba).
No sé hasta cuánto ni cómo influirá en mi conducción todo lo que hice ese día en Finlandia con Škoda, pero aunque no sea mucho, siempre se aprende algo y lo cierto es que el tacto de conducción se va desarrollando a base de experiencia.
Pablo David González
¿envidia? Nooooooo
Espero el karoq ese no esté afectado por esta situación http://www.aecosan.msssi.gob.es/AECOSAN/docs/documentos/consumo/pdf_redalerta/38-2018.pdf
Consultar la página de consumo del ministerio es como ver un espectáculo de horrores automovilísticos, casi de consulta obligada semanal para ver si nuestro coche tiene alguna llamada a revisión…
Interesante reportaje.
https://www.rodiautosport.es
El Skoda es un gran coche para el invierno. Tuvew la oportunidad de probarlo hace un par de meses y me sorprendieron sus buenas prestaciones sobre suelo mojado.
Estas experiencias tienen que ser alucinantes. Hace tiempo que sigo las que organiza audi y tienen una buena pinta…
Saludos
En https://www.area-alquiler.com ponemos a su disposición la más extensa
gama de vehículos industriales sin conductor
en régimen de alquiler