
Los sistemas de frenada automática de emergencia (AEB) son uno de los pilares de la seguridad de los vehículos de hoy en día. Tanto los pequeños utilitarios como los grandes SUV, cada vez más modelos incorporan radares, cámaras y software de análisis capaz de anticipar un choque y actuar por el conductor si este no responde a tiempo. Su eficacia está probada, y reducen significativamente los accidentes por alcance y sus consecuencias. Pero también tienen limitaciones que conviene conocer, porque confiar ciegamente en ellos puede generar una falsa sensación de seguridad.
Todos tienen, en esencia, el mismo principio: el coche vigila constantemente lo que ocurre delante y, cuando detecta un riesgo de colisión, avisa al conductor o inicia una frenada parcial o total. El resultado depende de la velocidad, el tipo de obstáculo, las condiciones ambientales y la capacidad del propio sistema para interpretar la escena. Al igual que ocurre con cualquier tecnología de asistencia, no sustituye al conductor, sino que actúa como una red de seguridad extra.
¿Cómo detectan el peligro?
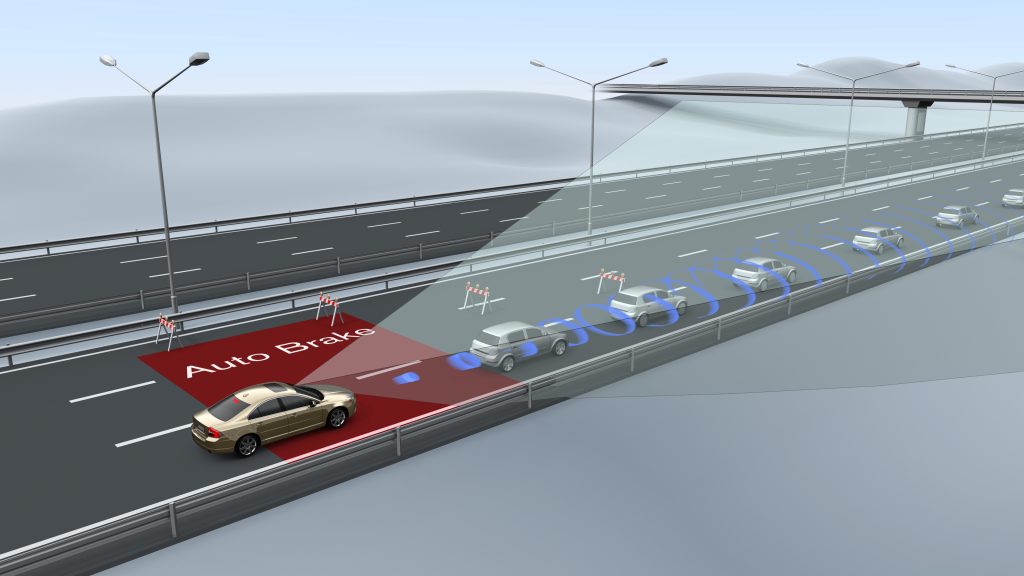
Estos sistema de emergencia se nutren de varios sensores: radar frontal, cámaras de alta resolución y, en los sistemas más avanzados, sensores LiDAR, y cada uno aporta una información distinta. El radar mide las distancias y velocidades relativas con gran precisión, incluso en condiciones de baja visibilidad. La cámara interpreta las formas y reconoce peatones, ciclistas o señales. El LiDAR, por su parte, crea un mapa 3D de la escena.
El software del vehículo se encarga de combinar todos esos datos y decide si existe riesgo de colisión. Cuando detecta que la velocidad relativa entre el coche y el obstáculo supera el umbral que considera crítico, lanza un aviso tanto sonoro como visual. Si el conductor no reacciona, el sistema tensa los frenos y aplica una frenada de emergencia que puede llegar a detener el vehículo por completo.
Los fabricantes calibran estos sistemas para evitar frenazos innecesarios, porque una intervención en un momento que no corresponde puede provocar un accidente en lugar de evitarlo. Por eso los algoritmos tienden a ser más conservadores y priorizar la estabilidad del vehículo antes que detener el vehículo de forma precipitada. En la práctica, esto significa que el AEB prefiere pecar de prudente y no intervenir si la situación no es inequívoca.
Límites de los sistemas AEB: ¿en qué casos no funcionan?
Aunque los sistemas de frenada automática han avanzado mucho, todavía no son infalibles. Las cámaras dependen de la luz y pueden fallar con sol de frente, o en condiciones de lluvia intensa o niebla. Los radares, aunque son más fiables, tienen dificultades para reconocer algunos objetos, como puede ser una moto o un remolque sin superficie reflectante. Además, los algoritmos pueden confundir ciertas situaciones, por ejemplo, guardarraíles o señales verticales con vehículos detenidos.
Muchos sistemas AEB están diseñados para evitar o aliviar las colisiones con objetos que se mueven en la misma dirección. Sin embargo, no son de gran utilidad ante vehículos que están parados, mientras el coche circula a una velocidad elevada. Las pruebas de Euro NCAP han ido endureciendo estos escenarios, pero los resultados varían mucho entre fabricantes.
Los peatones y ciclistas también son un reto para estos sistemas. Detectarlos de día es más sencillo, pero de noche la tasa de acierto se reduce mucho, especialmente si visten ropa oscura o si la iluminación urbana es deficiente. La velocidad es otro factor determinante, y por encima de 60 km/h, muchos sistemas pierden capacidad de reacción.
A todo esto se suma la complejidad del tráfico real y ciertas situaciones. Por ejemplo, fallan mucho en intersecciones con ángulos extraños, coches aparcados parcialmente invadiendo el carril o situaciones en las que un objeto aparece de repente. Por ese motivo, los fabricantes dejan claro que el AEB es únicamente una ayuda complementaria.

Que cojones????
1. «cada vez más modelos incorporan radares, cámaras y software de análisis capaz de anticipar un choque y actuar por el conductor si este no responde a tiempo» –> En Europa, TODOS, salvo los de nicho rollo Caterham. GSR II obliga a ello.
2. «Estos sistema de emergencia se nutren de varios sensores: radar frontal, cámaras de alta resolución y, en los sistemas más avanzados, sensores LiDAR» –> no, no hay NINGUN sistema «mas avanzado» hoy dia que use LiDaR para el AEB. Y no voy a entrar en la interpretacion de fantasia de lo que hace cada sensor.
3. «Los radares, aunque son más fiables, tienen dificultades para reconocer algunos objetos, como puede ser una moto o un remolque sin superficie reflectante.» –> WTF???? Nombreme alguna moto o remolque que NO tenga superficie metalica alguna. Confunde vd «poder detectar» con «discriminacion de objetos», pero eso es 1) cosa del pasado y 2) algo que poco tiene que ver con lo que dice
4. «los algoritmos pueden confundir ciertas situaciones, por ejemplo, guardarraíles o señales verticales con vehículos detenidos.» –> Por el amor de dios…
5. «no son de gran utilidad ante vehículos que están parados» –> Bienvenido a 2008! Las pruebas de NCAP analizan recciones ante vehiculos detenidos desde 2014. Y si, los sistemas reaccionan ante vehiculos y obstaculos estacionarios.
6. «Los peatones y ciclistas también son un reto para estos sistemas», «de noche la tasa de acierto se reduce mucho, especialmente si visten ropa oscura o si la iluminación urbana es deficiente», «por encima de 60 km/h, muchos sistemas pierden capacidad de reacción» –> De verdad, que parece que haya usado una maquina del tiempo y estemos en 2008.
Ya paso de seguir.
Hombre Slayer,
No se ponga así, entienda que esto no es un foro tecnológico 🙂
A mí me mola mas fijarme en expresiones como » tensa los frenos» eso debe ser por lo menos del siglo pasado.
Y otra cosa que me sorprende siempre es que el Euroncap aparece como adalid de todo, lo pongo por 20ª vez por aquí. Euroncap es una empresa privada, que ha conseguido logros, pero que también tiene un marketing excelente y en ningún caso es necesario cumplir ningún ensayo Euroncap para vender un vehículo en Europa, otra cosa es intentar venderlo sin estrellas Euroncap.
La puesta en venta va por otro lado (normativas SAE y homologaciones CE y seguramente algunas más)
Y esto, «no sustituye al conductor, sino que actúa como una red de seguridad extra» debería estar de acuerdo, pero no, actúa como un salvapellejos, sobre todo enlos pasos cebra. El peatón con el móvil, el conductor con el móvil, y Santa «electrónica» vigilando. Lo que me demuestra la carretera todos los días es que hay muchos conductores que en su coche hacen de todo menos conducir, así que me jode decirlo, pero espero que prontamente los coches incorporen un sistema obligatorio (todos, incluidos los antiguos) que impidan el uso del móvil salvo para recibir llamadas a traves del equipo de audio del vehículo. Si se puede desarrollar la baliza de emergencias, se puede obligar a inhibir el teléfono.
Espero con ansia la llegada de algún vehículo (de gama media) con nivel de conducción autónoma nivel 4, a ver si dejamos de matarnos unos a otros en la carretera.
Saludos, un gusto como siempre.
Saludos
Iván Dávila -> ID -> IA