
En la última década, algunos de los Sistemas Avanzados de Asistencia a la Conducción, también conocidos como ADAS, han pasado de ser un equipamiento de lujo a convertirse en un estándar obligatorio en los vehículos nuevos vendidos en la Unión Europea. Entre ellos, el Asistente de Frenada de Emergencia (AEB) es, sin duda, uno de los más importantes. Sin embargo, su implementación no está exenta de retos técnicos.
Muchos conductores han experimentado alguna vez una alerta sonora o, en el peor de los casos, un frenazo brusco sin obstáculo aparente. Para entender por qué ocurre esto, es necesario analizar cómo ve el coche su entorno y cuáles son los límites actuales de esta tecnología.
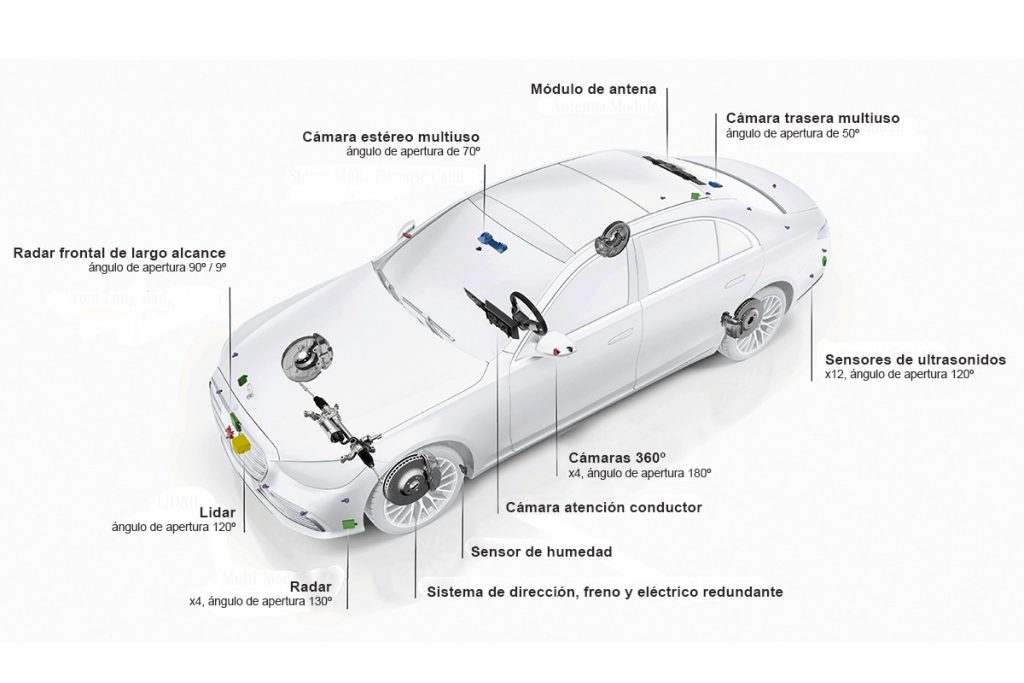
En la mayoría de vehículos el Asistente de Frenada de Emergencia funciona con una fusión de sensores. Esto significa que combinan la información de un radar (generalmente ubicado tras la calandra delantera) y una o varias cámaras (situadas en la parte superior del parabrisas, normalmente en el centro de la luna). En algunos sistemas más avanzados, especialmente en vehículos de gama alta, también puede emplearse lidar, un sensor basado en láser que permite obtener una representación tridimensional muy precisa del entorno.
El radar es excelente midiendo distancias y velocidades relativas, incluso en condiciones de baja visibilidad, pero tiene poca resolución para distinguir formas. La cámara, por su parte, es capaz de clasificar objetos según si es peatón, ciclista o coche, pero es más sensible a las condiciones de luz y clima. El problema aparece cuando la interpretación de estos datos genera un conflicto en el algoritmo central.
Limitaciones y errores
Uno de los motivos menos frecuentes, pero técnicamente posibles, por los que un coche puede detectar un riesgo inexistente es el fenómeno de las reflexiones múltiples del radar. Este sensor emite ondas que rebotan en los objetos y regresan al receptor, pero en determinadas situaciones —como curvas cerradas, túneles o entornos con estructuras metálicas— esas ondas pueden reflejarse en varias superficies antes de volver. Esto puede generar lo que se conoce como «objetivos fantasma», es decir, detecciones que no corresponden a un obstáculo real en la trayectoria del vehículo.
Aunque los sistemas modernos incorporan algoritmos avanzados para filtrar este tipo de errores (mediante seguimiento temporal y coherencia física de los objetos) en escenarios complejos pueden persistir ambigüedades que contribuyen a una detección incorrecta
Por otro lado, la cámara también puede equivocarse. Las sombras proyectadas por edificios o árboles bajo un sol muy bajo pueden crear contrastes que el software de procesamiento de imágenes confunde con obstáculos físicos. Del mismo modo, el vapor de agua que sale de los escapes en invierno o el polvo en suspensión pueden ser interpretados como objetos sólidos si el sistema no está correctamente calibrado. Cuando el radar detecta un «eco metálico» y la cámara, debido a una sombra o un deslumbramiento, no puede descartar con total seguridad que haya algo allí, el sistema suele priorizar la seguridad y lanzar una advertencia o activar los frenos.
Funcionamiento del algoritmo
La ingeniería de estos sistemas se enfrenta a un dilema constante en términos de sensibilidad. Si el sistema es muy poco sensible, corre el riesgo de no activarse ante un atropello real, en lo que se conoce como un falso negativo. Si es demasiado sensible, generará alertas constantes ante cualquier sombra o bache, dando lugar a falsos positivos.
Los fabricantes suelen programar los sistemas de modo que tiendan más a ser conservadores. Desde el punto de vista de la responsabilidad y la seguridad, es preferible que el coche dé una alarma innecesaria a que falle en una situación crítica. No obstante, esto genera lo que los expertos llaman fatiga de alerta: si un conductor recibe demasiados avisos falsos, acaba desconectando el sistema o ignorándolo, lo que tira por la borda su beneficio preventivo.
Además, el comportamiento humano es difícil de modelar para un ordenador. Un conductor experimentado puede anticipar que un coche que está girando en una calle lateral va a despejar el carril a tiempo, pero el algoritmo del coche, basándose estrictamente en la trayectoria y la velocidad actual de ambos vehículos, puede calcular una colisión inminente y aplicar los frenos de forma preventiva. Aunque los sistemas modernos intentan predecir trayectorias, aún tienen dificultades en escenarios ambiguos: es lo que todavía diferencia la percepción de una máquina de la de un humano.
Es interesante, gracias.
He tenido una experiencia que he logrado reproducir y que tiene más que ver con predecir lo que va a hacer el conductor y con la interpretación del entorno. En una avenida de dos carriles por sentido y coches aparcados en fila, al acercarme a una calle trasversal pequeña por el carril derecho, esquivo un bache debido a una arqueta profunda, de manera que primero invado levemente el carril izquierdo (volante a la izquierda) y luego vuelvo al carril (volante a la derecha y después a la izquierda para retomar el carril derecho). Al hacer la maniobra, el coche por un momento se dirige al primer coche aparcado inmediatamente posterior a la calle trasversal. El volante en ese momento está pasando por el centro para finalmente girar a la izquierda y retomar el carril derecho. El peligro que yo percibí es nulo, pero la alerta salta (por suerte, sin intervención en la frenada).
Obviamente esto depende del modelo concreto, pero seguro que mucha gente acaba detectando este tipo de pequeños defectos.
Pues eso mismo me comentaba un familiar. Y le dije que ya se han cargado la conducción y el placer de conducir.
En algunos casos salen hadas y las cámaras las detectan y el coche se vuelve loco.
En teoría son unas ayudas que crearon para facilitar la conducción. Los fabricantes lo instalaron en algunos coches y después darían orden a los políticos europeos para que las impusieran obligatoriamente. Los políticos no tienen idea de esto. Habrá alguna excepción. Entonces vieron el negocio, que era aumentar los precios de todos los coches. Algún listillo, parásito, palmero les dió la idea y era una forma de unirse fabricantes y políticos para llenarse los bolsillos.
Deberían de desconectarse por completo o parcialmente.
La tecnología siempre ayuda a quién invierte. En algunos casos es positiva, pero en otros no. Ejemplo de drones para la guerra, bombas nucleares y todo tipo de armamento. También aumentan las producciones para que la gente vaya exprimida teniendo el mismo salario. Los despidos de las personas son brutales. En fin, todos sabemos que no siempre es positiva. Pero nadie dice ni hace nada.
Que las ADAS pueden ayudar, pues sí. Pero el dueño del coche debería de elegir su conexión o no. Pero claro, entonces se les va el negocio, los beneficios, las comisiones y la riqueza.
Si no quieres ADAS te tienes que comprar un coche de segunda mano que sea libre y no se las hayan puesto. O simplemente no comprar coche y te ahorras un dinero al año. Cada vez hay más gente que vende su coche y ya no compra. Es lo que consiguen. Y aumentan las ventas porque en todos los países han venido millones de personas. Pero sin ADAS aumentarían mucho más.
Pero cuántas historias inventan para subir precios…
Lo venden como que es para ayudar y es para enriquecerse y encima marear al personal.
Lqs ADAS deberían ser todas opcionales… y para que sean obligatorias, debería haberse abierto previamente un debate público, con expertos que difundan toda la casuística accidental hasta la fecha, comparando accidentes análogos, en los que estén involucrados vehículos con y sin cierto dispositivo de seguridad.
Una vez que todas estas bases de datos de accidentes fueran de dominio público (convenientemente anonimizadas, por supuesto), debería haberse consultado a la población acerca de la obligatoriedad de las ADAS.
Y este mismo proceso de transparencia debería haberse aplicado a todos los demás equipamientos de seguridad (cinturones de seguridad, airbags, ABS, ESP…), si de verdad vivimos en sociedades avanzadas y democráticas.
Seguridad sí, mareo, fallos continuos y sistemas erróneos no!! Chapuzas que las hagan en su casa.
Completamente de acuerdo. Imponer, dictar, decretar por orden de algún poderoso sin haber una elección real y sin farsas, no es más que demostrar una dictadura salvaje, que no tiene en cuenta a nadie más. Pero las elecciones tienen que ser reales, no que digan los porcentajes que les dan la gana en los medios. Lo que llamaron hace muchos años democracia se lo cargan y demuestran el engaño al que es sometido el personal. Y cada vez ocurre más en todos los países. Guerras, pandemias, subidas en la alimentación, energía, solo porque los poderosos se lo ordenan a los gobiernos de los países. Ahí está Trump, Putin y en general un montón de Presidentes que solo hacen que obedecer, alabar, besar y palmear al poderoso que no da la cara.
Se han metido en el sector del automóvil y han creado un sistema que da muchos errores y que puede crear accidentes. Y dicen que lo inventan por seguridad. Cómo siempre disfrutando de engañar al ciudadano. Porque si no te lo crees, pues ya te echan un sin fin de multas, sanciones y detenciones.
Que diferencia de como vendieron la democracia a lo que hay hoy en día. Están demostrando que democracia es una palabra que utilizaron para engañar, crear una ilusión y después machacar al personal, con todo tipo de amenazas. Cómo en la pandemia, si sales de casa, te detienen, te multan y te hacen la vida imposible. Siempre amenazando.
¿Cual es el precio de un muerto?.
Tras un estudio riguroso con mas de 1000 atropellos, el resultado dice que los vehículos equipados con un sistema de detección de peatones y frenada automática de emergencia redujeron el Nº de atropellos en un 30% y al mismo tiempo redujeron las lesiones en los casos de atropello. Fuente EVU España.
En los accidentes por alcance en camiones de gran tonelaje se estima una reducción del 41% en el número de colisiones por alcance y de un 12% en número de colisiones en general. Fuente IHSS.
Si el 100% de los vehículos de turismo del parque español equiparan este sistema se podrían haber evitado el 20% de los accidentes y salvado un 16% de los fallecidos. Fuente RACC (estudio realizado en 2014 con recomendación de implementar ADAS y subvencionar la compra de vehículos nuevos con mas equipamiento.
Pue no encuentro yo a los políticos, y no creo que se deba consultar todo a la población, podríamos discutir si el cinturón de seguridad salva vidas, ¿o no?.
Saludos
Y No, pensar y decir que esos estudios los pagan lobbies masones no vale. La IHSS es una asociación independiente formada por aseguradoras, que al final son quienes pagan los muertos y heridos de tráfico. Y EVU y el RACC tampoco son lobbies económicos.
@3, Vicente,
Ya se le ha afeado la conducta en numerosas ocasiones al respecto.
Consultar a la poblacion acerca de la obligatoriedad de ADAS. Claro que si. Porque la poblacion lo entiende. Y porque nuestros politicos tambien serian capaces de explicarlo perfectisimamente. Ya me veo a Mopongo, a Feijoo, a Abascal o a la cajera del Saturn ofreciendo un debate sano y con todos los elementos necesaior para tomar una decision. Claro que si.
Deje de decir tonterias.
Lo de dejar de decir tonterias tambien aplica a #2, pero ya me he cansado de constatar lo evidente
@Alex.
Es que me cansa, me cansa sobremanera discutir con gente que no tiene ni puta idea de lo que habla, que ven conspiraciones por todas partes, que piensan que porque saben juntar dos palabras sin faltas de ortografia evidentes ya estan en posesion de la verdad.
De verdad, me agota. Asi que, «Vale, si, lo que tu digas» y a tomar por culo.
Querido Slayer.
Tiene razón, pero no podemos darnos por vencidos, y menos hoy, la Inteligencia Artificial (IA) desarrollada para profesionales da unas capacidades de cálculo y análisis que supervisada por un especialista consigue resultados asombrosos.
Lamentablemente también se ha desarrollado la Inteligencia Artificial (IA) que combinada con la Idiotez Natural (IN) y los algoritmos, es, como escuché hace un par de días, Chatgpt como supercuñado con Google incorporado que además dependiendo de nuestros hábitos en Internet nos moldea el cerebro hasta límites insospechados y nos elimina la tediosa y agotadora actividad de pensar, analizar y consultar.
Un beso a todos.
@6 ¿Por qué los expertos en seguridad vial, no se atreven a «explicar perfectísimamente» a la ciudadanía, las bondades de las ADAS, o de cualquier otro dispositivo de seguridad, en redes sociales (e.g. canales de YouTube de las asociaciones o instituciones, que supuestamente tratan de mejorar la seguridad vial), mostrando y defendiendo esas estadísticas de siniestralidad, así como publicando las bases de datos de accidentes reales (como la BAAC del observatorio francés ONISR, pero en el que se incluyera también el equipamiento de seguridad de los vehículos involucrados, como el ABS, ESP, Airbags, ADAS…. o incluso el rango de potencia, peso, distancia entre ejes… de los mismos?
¿De verdad cree Vd que los políticos deberían explicar este tipo de asuntos a la ciudadanía? ¿A Vd le parece razonable que en una sociedad avanzada, no se publiquen los datos reales de la casuística accidental, que sirven de base a los expertos, para elaborar las estadísticas que recomiendan utilizar unos equipamientos de seguridad u otros, y por tanto, le parece sensato que la ciudadanía confíe ciegamente en esos expertos?
Independientemente de la publicación de datos que sean reales o no, lo que no se puede comprender es decir que hay un sistema de seguridad que se va a implantar dictatorialmente y después tenga fallos que puedan provocar un accidente. Tanta prisa había?
Un sistema de ayudas como dicen tiene que estar bien planteado, comprobado y pasar todas las pruebas durante el tiempo que sea necesario para su segura aprobación. Si no parece que sea una chapuza que hay que imponer como sea para subir precios y enriquecerse.
Sí la gente no exige calidad y seguridad, se puede llegar a un estado de relajación y el “da lo mismo” y no solo me refiero al sector del automóvil.
Está claro que la perfección no existe, pero si hay un porcentaje aunque sea bajo de inseguridad, no hay que sacarlo al mercado de momento. Porque esos fallos de seguridad pueden dar lugar a muchos accidentes. Que no son helados, que son máquinas de matar. Haber si nos espabilamos porque una cosa son las informaciones y cómo te lo venden los medios y otra cosa es la realidad y la verdad. El sistema no es que esté corrupto, es lo siguiente al cuadrado. Veo la botella medio vacía?
Oye, mira que voy a ver la botella medio llena:
El sistema de ADAS es lo mejor que ha salido al mercado en los últimos años y da una total seguridad en la conducción, solucionando todos los problemas de accidentes.
Pero claro, es que tiene fallos y no puedo verla medio llena, más bien 1/12.
¿Te gusta conducir?. Entonces, lo tienes dificil en la actualidad, con la cantidad de limitaciones técnicas que nos imponen los políticos. Si se te estropea el coche, y no hay repuestos, , comprate un coche con matriculación anterior al 2.000, en que aún no habia gili….. de «sistemas de seguridad». Lps punta-tacón en la Rabasada con mi Peugeot 206 GTI, los recuerdo con mucho más agrado que el sosismo con el que conduzco en la actualidad. Tal vez es que tenía casi 30 años menos.
Es cierto que la conducción ha evolucionado mucho desde los años 80 y 90. Algunos avances han estado muy bien y otros no tanto. Ahora se ha llegado a coches de conducción semi autónoma de nivel 2 y nivel 3, que en algunos países está permitido y en otros no. Y van persiguiendo el nivel 5 en el que el coche será completamente autónomo. Hay gente para todo y a algunos no les gusta conducir o llevan un chófer. Supongo que éstos últimos sacarían partidos del nivel 5, porque no tendrían se ahorrarían chófer. El cambio automático fue un gran avance para la comodidad. Claro que el cálculo para los tiempos del cambio de marchas está hecho en fábrica y no puedes dominarlo. Dependes de quién lo ha fabricado. Por eso prefiero el manual, no me da pereza cambiar de marcha, me encanta y lo disfruto. Cuando he alquilado un coche nunca he querido el cambio automático, que dicen que es más cómodo y te olvidas del embrague. Los fabricantes obligan a que la gente compre lo que ellos quieren y donde tienen más beneficio. Les dicen a los políticos las leyes que tienen que imponer a la gente y así consiguen que la gente compre lo que les deja más beneficio.
La forma de conducir ha variado mucho desde los años 80 y 90. Ni es mejor, ni peor. Porque algunos avances también han sido positivos. Pero supongo que a la mayoría que hemos conducido en los años 80 y 90, añoramos aquella época por algo. Conducir un Ford Fiesta XR2 de 130cv era disfrutar de la conducción y ahora han querido que la gente esté super controlada con miles de cámaras para sancionar. Ahora quizás se mire más a la pantalla que a la carretera.
No se puede comparar, ni explicar la conducción de aquella época, hay que vivirla.
@Angel Me alegra saber que aún quedan personas a las que les gusta conducir… y a las que las ADAS actuales, no les terminan de convencer, ya sea por los sobrecostes que conllevan (precio de adquisición, y futuras reparaciones), o porque su puesta a punto aún no está lo suficientemente lograda en muchísimos casos, y terminan resultando muy incómodas para la mayoría social.
Por curiosidad, según Vd ¿qué sistemas de seguridad de los coches nuevos actuales, deberían ser montados opcionalmente, y cuáles deberían ser obligatorios?
Y en caso de que todos fueren opcionales ¿qué porcentaje de la población, cree Vd que compraría coches con todo el equipamiento de seguridad, obligatorio en la actualidad en la UE?
Gracias por su atención, y reciba un cordial saludo
@richi y @Vicente g. Intento responder a los dos. Mi primer coche propio, despues del usufructo del R8 TS de mi padre, fué un Simca 1200 TI, con su motor de 1442 cc. Fué un coche noble, con unas prestaciones excelentes para la época, y que servia para todo, desde intimidades en descampados a mudanzas propias y de amigos, y que en ocasiones, se veia el 200 en el salpicadero. Despues de 10 años y 160.000 Km., consumiendo más aceite que gasolina y con una compresión en el motor reducida a la mínima expresión , tocó el cambio por el 306 GTI. Coche mucho más ligero, y con su motor de 1600 cc, era una gozada su conducción, mas nervioso que el 1200 TI. Despues de 4 años de disfrute, y con la llegada de los retoños, tocó despedirse del GTI y empezar a sosear con los monovolumenes.
En cuanto a las ADAS, tendrian que ser todas VOLUNTARIAS. Igual que tienes diferentes paletas de colores e interiores, también deberian de serlo las ADAS, y que fuera el consumidor quien las solicitase. La intromisión que hace la industria y la política en tu derecho a decidir, se vuelve insoportable. En cuanto al porcentaje de ususarios que disfrutan conduciendo, cada vez es más pequeño, cuestión de hábitos, y ahora se valoran más los gadgets que llevan los vehículos en sus pantallas de infoentretenimiento, que el par motor y las rpm. a las que se alcanza. En fín, los viejos rockeros, los que nos gusta conducir, somos una especie en vías de extinción.
206 GTI . Sorry for the mistake.
Sres. de arriba, ¿Podrían decirme cuantos vehículos han tenido y cuantos km. conducen por puro placer al año?.
Y ya de paso, ¿alguno de Vds. tiene experiencia en competición ó al menos tiene un vehículo con el que disfrutar en un circuito?.
Yo he tenido 11 vehículos en 35 años, al menos 200.000 km por placer por media Europa, incluyendo las Autobahn alemanas tan recurridas en las conversaciones de barra de bar. He pagado por correr en Nurburgring, en «taxi» del circuito y en coches de alquiler.
Uno de mis vehículo actuales tiene control de crucero activo con mantenimiento y centrado en carril con función Stop/Start para atascos en circunvalaciones, Reconocimiento de señales con avisador de límite de velocidad. Sistema de frenada de emergencia para peatones y ciclistas día y noche, además de frenada de emergencia anticolisión por alcance.
En cuanto entro en una autovía e incluso en algunas carreteras de doble sentido aisladas activo el control de crucero adaptativo en la velocidad máxima (sin multa) de la vía y les garantizo que mis viajes son mucho mas descansados y seguros, es como llevar un copiloto silencioso que nunca se cansa. También activo un navegador conectado que ya empieza a dar avisos por vehículos parados con la criticada baliza activada y avisos de atascos y obras, super útil en Francia y Alemania.
Lo que no tiene este coche es estampita de «San Cristobal», ni una foto de los niños con el clásico «Papá no corras», ni tampoco un perrito que mueve la cabeza en la bandeja trasera. Ninguno de estos equipamientos de seguridad ha demostrado haber salvado ni una sola vida.
Saludos.
@15
¿206 GTI 1.600 cc?
Un conocido se compró un coche nuevo e hizo un cambio de carril. Me dijo que lo había hecho cómo siempre, pero la dirección del coche se volvió loca, se asustó y cogió el volante fuertemente para ver si conseguía conducir el coche. Y también un montón de pitidos que no sabía de qué eran. Lo llevó al concesionario y dijo que casi tiene un accidente, porque se asustó. Dice que le quitaron en la pantalla un montón de ADAS, porque marean mucho.
Pero claro, ya le han vendido el coche y decía que si lo hubiera sabido no lo hubiera comprado. Que se la han clavado hasta el fondo y que lo venderá más adelante y que prefiere no tener coche. Ya alquilará si le apetece alguno, pero sin ADAS.
Pero las ADAS han encarecido los coches que es lo que se buscaba. Y a la gente se le quitan las ganas de conducir.
Te gusta conducir? Pues van a hacer que no te guste.
La gente joven que compra coche quizás se adaptará mejor, pero nunca, nunca va a disfrutar de la conducción cómo lo hacíamos en los años 80 y 90. Ahora estás controlado por miles de cámaras, helicópteros, agentes, sensores, miles de semáforos que no hacen falta, ADAS innecesarias.
Tanta tecnología no es positivo para la conducción, da lugar a muchas distracciones y por lo tanto aumenta el riesgo de accidentes. Y los accidentes producidos por tanta tecnología? Eso no lo cuentan?. No es cuestión de negatividad, es cuestión de que no sean tan avaros y ambiciosos y hagan bien las cosas.
Que buenos fueron los años 80 !!
No Richi,
Su conocido se compró un coche nuevo, no se informó de como funciona nada, no le explicaron, no probó nada y casi la lía el solo.
En cuanto a «quitar» ADAS de la pantalla porque despistan mucho. ¿Ein?. hoy las ADAS en muy pocos casos se pueden desactivar, alguna sí, pero al encender de nuevo el coche se vuelven a activar. Es la norma.
En cuanto a un cambio de carril que hizo «como siempre», le creo, como siempre lo hacía, sin poner el intermitente ó sin siquiera poner el intermitente de un toque. Ni una sola vez en 6 años mis 2 coches actuales han intervenido en falso, siempre y cuando se active el intermitente claro. E incluso si no se pone el intermitente con sujetar firme el volante y girar hacia donde quiero se desactiva el sistema.
Y es más, si conduzco «trazando», con el volante bien sujeto me permiten invadir tanto el arcén como la línea central.
Desde luego, con lluvia intensa y de noche en carreteras mal pintadas ve el coche mejor que yo los límites de la vía.
Hay que probar y conducir mucho antes de opinar.
Saludos
@18
De los creadores de «Le entro el turbo al reducir en la curva y se mato», llega «El volante se volvio loco», «le quitaron los ADAS de la pantalla»
Tremendo. Y vd tiene derecho a voto, claro
Pues vendió el coche y que mareen con las ADAS y la conducción actual a otros.
Y ahora tiene uno sin ADAS y alegre y feliz.
Cuál será la siguiente invención?
@richi
Su amigo es un lince. Ahora tiene un coche peor habiendose dejado dinero por el camino.
Felicitele de mi parte. Una jugada maestra.
Lo sabe, y a mí me compró muy bien mi coche.
Ambos alegres!!
Hoy día si quitaran todas las ADAS tal y como «conduce» el personal más garrulo, con botijos tan gordos, habría hostias de todos los colores. El 70 por ciento de ellas sus conductores no lo contarían. Antes se conducía con más atención, entre otras razones porque los coches no eran tan seguros, si te la pegabas te hacías daño gordo seguro. Ahora se pasea, o se compite a altas velocidades, todo usando el móvil y manejando pantallas. De llevar un ritmo constante, dejar pasar por la izquierda, ceder el paso, pararse en stops, o usar el intermitente, para respetar y ser respetado, nada, de nada. Cualquiera se pasa todo por el forro, si te cruzas con alguno de ellos por muchos ADAS que lleve instalados no se pide disculpas, hay que subir la apuesta y cagarse en su p. Madre. Por menos que eso, antes se acababa a hostias, o en la comisaría, ahora está muy normalizado todo se hace a saco, al espacio, no te paras en un ceda, te tiras delante, a ser posible obligas a que no te den un golpe. Solo con quitarles el ESP a los vehículos sus conductores no harían ni la mitad de gilipolleces que hacen. Y qué decir de los menús de las pantallas y sus asistentes, algunos no saben ni donde están en ese momento, no bastante con ello se ponen a investigar, a manejarlos y buscar sobre la marcha, estos nunca van a entender como funcionan sus asistentes. Siempre digo lo mismo, correr sí, y hacer el canelo vale, pero respetando, sin joder a los demás, con seguridad, tanto para uno mismo como para los demás, si es en circuito cerrado haciendo tiempos, gastando frenos y ruedas, mejor. Probar, saldréis muy relajados, con asistentes o sin ellos, entenderéis de qué va eso de la conducción diaria. En cambio, a todos esos «pilotos» que van pintando la mona, haciendo el macarra, estorbando, y haciendo ruido con el «asistente»del ruido de los escapes, que se los metan por el orto. Salud.
Hoy día si quitaran todas las ADAS tal y como «conduce» el personal más garrulo, con botijos tan gordos, habría hostias de todos los colores. El 70 por ciento de ellas sus conductores no lo contarían. Antes se conducía con más atención, entre otras razones porque los coches no eran tan seguros, si te la pegabas te hacías daño seguro. Ahora se pasea, o se compite a altas velocidades, todo usando el móvil y manejando pantallas. De llevar un ritmo constante, dejar pasar por la izquierda, ceder el paso, pararse en stops, o usar el intermitente, para respetar y ser respetado, nada, de nada. Cualquiera se pasa todo por el forro, si te cruzas con alguno de ellos por muchos ADAS que lleve instalados no se pide disculpas, hay que subir la apuesta y cagarse en su p. Madre. Por menos que eso, antes se acababa a hostias, o en la comisaría, ahora está muy normalizado, todo se hace a saco, al espacio, no te paras en un ceda, te tiras delante, a ser posible obligas a que no te den un golpe. Solo con quitarles el ESP a los vehículos sus conductores no harían ni la mitad de gilipolleces que hacen. Y qué decir de los menús de las pantallas y sus asistentes, algunos no saben ni donde están en ese momento, no bastante con ello se ponen a investigar, a manejarlos y buscar sobre la marcha, estos nunca van a entender como funcionan sus asistentes. Siempre digo lo mismo, correr sí, y hacer el canelo vale, pero respetando, sin joder a los demás, con seguridad, tanto para uno mismo como para los demás, si es en circuito cerrado haciendo tiempos, gastando frenos y ruedas, mejor. Probar, saldréis muy relajados, con asistentes o sin ellos, entenderéis de qué va eso de la conducción diaria. En cambio, a todos esos «pilotos» que van pintando la mona, el macarra, estorbando, y haciendo ruido con el «asistente» de los escapes, que se los metan por el orto. Salud.
¿Como se borran los comentarios que no quieres que salgan?. No se que he hecho, no encuentro este ADA a la escritura y su publicación. Ha salido dos veces..sorry!
@Alex Aprendí a conducir en un pequeño pueblo atravesado por una carretera estrechísima, sin líneas pintadas en el pavimento, y sin apenas señalización vertical (algún stop, ceda el paro, de peligro de curva peligrosa, y poco más), y en el pueblo tampoco había semáforos, ni pasos de peatones…
Al cruzarse con otros vehículos, camiones, tractores… era habitual tener que pisar un poco el campo, y lo mismo sucedía en curvas con poca visibilidad o cambios de rasante (previo uso del claxon, y de noche también de las luces largas, para prevenir de nuestra presencia). Encontrarse con peatones, ciclistas y carros tirados por animales, era también muy frecuente, de modo que los cambios de ritmo eran continuos.
Para adelantar a otros vehículos, había que pedirles paso con el claxon, y éstos solían facilitar la maniobra con el intermitente derecho, y ajustando su marcha al derecho, cuando consideraban que había espacio suficiente.
Por carreteras de este estilo recorrí muchas decenas de miles de km, por multitud de pueblos, y cuando circulaba por carreteras convencionales de doble sentido, mucho más anchas y mejor señalizadas (y por las que también recorrí distancias similares), la sensación de seguridad era inmensa, y comparativamente hablando, análoga a la que se tiene por las actuales autovías, respecto a las carreteras convencionales.
¿Cuántas decenas o cientos de miles de km ha recorrido Vd por carreteras estrechísimas, sin apenas señalización, para poder opinar acerca de las bondades de cualquier sistema de seguridad moderno?
¿Deberían hacerse los exámenes del carnet de conducir en este tipo de carreteras, y en vehículos sin ADAS, para comprobar las habilidades de los conductores?
¿Debería indicarse en el carnet de conducir, como sucede con el cambio automático, que el conductor sólo puede conducir vehículos con ADAS?
¿Servirían de algo los ADAS en esas vías tan estrechas, y sin apenas señalización?
Recuerdo hace unos 25 años ir a Nerin desde Formigal. La carretera era super estrecha y había que tener mucha atención para no salirse y precipitarse al vacío. En aquella época las carreteras del Pirineo eran difíciles, pero recuerdo que disfrutaba conduciendo. Había que pitar en curvas.
Por otro lado la conducción en los años 80 y 90 era muy placentera. No tenías que preocuparte por las cámaras, los helicópteros, ni por sistemas de vigilancia múltiples. Solo te preocupabas de conducir lo mejor posible y poner mucha atención.
Entiendo que el sistema de ADAS lo impusieron para elevar precios con la coartada de ayudas de seguridad y comodidad. Pero no estoy de acuerdo en que fuera dictatorialmente obligado. Debía de haber sido opcional (algunas ayudas son positivas, pero pueden fallar, no te fíes) y no imponerlo en todos los equipamientos. O si obligan, desactivarlo según la persona elija.
Ahora cuando alguien vaya a hacer prácticas para el permiso de conducir varias clases irán dirigidas a explicar todo la parafernalia que han inventado. Buen negocio.
Y no solo es mi opinión, es la opinión de muchos que conducimos en los años 80 y 90 y disfrutamos de una conducción de libertad. Por eso algunos compran coches de antes o directamente no compran. Ahora están haciendo muy engorrosa la conducción y porque te pases 7 km, te meten multas. Eso es ambición y avaricia por recaudar. Pero como son los que mandan pues hacen lo que quieren y su círculo les aplaude porque todos ganan mucho dinero.
Es una época pasada, que ya nunca volverá y ahora han robotizado, programado y mentalizado al personal que todo lo que hacen es por el bien de la conducción. Y por supuesto que es por embolsarse millones y millones.
La máxima seguridad en la conducción la da la persona y un buen trato de la máquina que lleva.
Señor Vicente g. con cariño,
Se ha olvidado de «la Verde», esa luz que llevaban los camiones que servía para indicar que el camionero sabía que tenía un turismo detrás. Era una ADAS de la época, bien usada podía ser muy útil, lástima que muchos conductores cuando veían que el camionero encendía «la verde» decidían que podían adelantar y se mataban, se mataban. La verde se retiró.
La verde + intermitente a derecha era la indicación correcta del camionero de que no veía nadie de frente.
De carreteras sin pintar, sin arcén de 5 metro justitos de ancho, con rotos tendré la misma experiencia que Vd. solo que en menos años.
Y envejezco con dignidad, intentado poner toda mi atención cuando conduzco, con vehículos modernos, sigo aprendiendo y confiando en las ADAS igual que confío en las gafas de leer.
Y así de barra de bar, desde que me dejaron sentar en un asiento de conductor hasta que tenía mi carnet tardé 10 días laborables.
@Alex En una sociedad avanzada, libre y democrática, no basta con la opinión subjetiva de los conductores (basada en su mayor o menor «experiencia al volante»), para defender la implementación obligatoria de los ADAS, del ESP, del ABS, de los airbags… ni tampoco con la publicación de «estudios rigurosos», por parte de ciertas «instituciones independientes», si las bases de datos de siniestralidad, en las que se fundamentan esos cálculos estadísticos, no son de dominio público. Sin transparencia informativa, no puede haber democracia, ni libertad.
¿Por qué cree Vd que las autoridades nacionales y europeas, no se atreven a publicar las bases de datos de siniestralidad (del estilo del BAAC del observatorio francés ONISR), de las últimas décadas, incluyendo también las características técnicas de los vehículos involucrados (ADAS, ESP, ABS, airbags…; rangos de peso, de distancia entre ejes, de anchura de vías, de altura, de potencia; tipo de tracción…), para que la ciudadanía no tenga que confiar ciegamente en los expertos en seguridad vial de las «instituciones independientes», de modo que cualquier persona pueda comprobar esas cifras y porcentajes de siniestralidad, con sus propios cálculos, si así lo estima conveniente?
¿Acaso esa falta de transparencia informativa, es necesaria para «eliminar la tediosa y agotadora actividad de pensar, analizar…», de buena parte de la mayoría social, y así poder manipularla más fácilmente?
Oiga,
¿Vd. sabe que todo el segundo párrafo que ha escrito es falso?.
Hay información oficial de sobra, eso sí, no se la van a poner en Twitter en 10 caracteres.
Y recuerde que los vehículos no se homologan para España sino para la Unión Europea.
@Alex Si según Vd, «todo el segundo párrafo que he escrito es falso», y por tanto, considera que las autoridades nacionales y europeas sí que publican en sus propias páginas web, las bases de datos de siniestralidad oficiales, para que tanto los expertos de las «asociaciones independientes», como cualquier ciudadano, puedan realizar búsquedas de accidentes, según los criterios técnicos que consideren oportunos: tipo de accidente (choque frontal, lateral, alcance, salida de la vía, atropello…); estado del pavimento (helado, nevado, mojado, seco…); «categoría» de los vehículos involucrados (por rangos de peso, dimensiones, potencia, tipo de tracción / propulsión / 4×4, sistemas de seguridad ADAS, ESP, ABS, airbags…, así como por el estado de sus neumáticos, frenos, amortiguadores, utilización del cinturón de seguridad / casco…)
¿podría decirnos los nombres de esas instituciones u observatorios nacionales o europeos, que ya ofrecen en sus propias páginas web, toda esta «información oficial de sobra», relativa a la siniestralidad vial?
Tremendas las batallitas que se leen aqui para justificar comentarios de barra de bar e inventadas varias.
Hay gente simplemente diciendo “barra de bar o cuñado”, pues se cree que ya está en lo cierto. Nada más lejos de la realidad en mi particular opinión. Prefiero hablar con personas que tienen un producto que me interesa o con mi cuñado, que creer lo que dicen los medios de comunicación que solo miran por su interés y lo que quieren meter en el cerebro para conseguir lo que quieren. De hecho la famosa frase de barra de bar y cuñado supongo que estará diseñada en los medios para quitar la confianza de las personas.
La verdad es que no entiendo cómo la gente se puede creer todo lo que dicen en los medios, sin querés escuchar a sus familiares, amigos y conocidos.
Así pasa, que nos dirigen cuatro enfermos mentales y miserables que disfrutan con los suyos en las barras de bar múltiples que tienen.
Se creen que en la TV dicen la verdad absoluta y es donde más inventan, manipulan y distorsionan. Que atraso. Haber si se espabila la gente!
@richi , eso le pasa por ver TreceTV , TeleMadrid , o escuchar la Cope…
Jajaajajajaaa al cubo, los medios los leo y veo para compartir con mi gente las grandes mentiras y manipulaciones que dicen
Vicente, por favor, ya puestos también puede pedir que se registre si el conductor afectado/a ha discutido con su pareja antes de encender el coche. Ó si un trozo del Skylab cayó encima del vehículo y causo el accidente.
Mientras no se registren esos datos le recomiendo que empiece por aquí. Tráguelo con calma, son 131 páginas
https://www.dgt.es/menusecundario/dgt-en-cifras/dgt-en-cifras-resultados/dgt-en-cifras-detalle/Las-principales-cifras-de-la-siniestralidad-vial-2024/
Y por favor no conteste cuestionando a quienes recopilan y gestionan los datos, son personas profesionales que hacen un trabajo muy respetable. Los datos son los que son y con ellos se trabaja. No son perfectos, pues seguramente no, pero son los que hay y con ellos se trabaja, del resto, charla de tertulia de Sonsoles.
@Alex Si de verdad nos preocupa la seguridad vial, debemos investigar las auténticas causas de los accidentes, así como los motivos de su mayor o menor gravedad, y es evidente que las características técnicas de los vehículos involucrados (rangos de potencia, de peso, de longitud, de distancia entre ejes, de anchura de vías, de altura, de altura libre al suelo… así como su equipamiento de seguridad, ABS, ESP, airbags, ADAS…. y el buen funcionamiento de todos ellos) son variables clave, que deberían aparecer en los informes de siniestralidad vial.
El trabajo de esas «personas profesionales», que elaboran esos «informes de siniestralidad vial», podrá ser todo lo «respetable» que Vd quiera, pero en la práctica, todos esos informes resultan inútiles a la ciudadanía, ya que no permiten comparar el mayor o menor «nivel de seguridad» de cada «categoría de vehículo», ni las bondades de su equipamiento de seguridad, y por eso casi nadie los consulta.
Realmente cada persona puede dudar de lo que quiera. Creer o no creer. Se puede creer en un sistema de ADAS impuesto dictatorialmente y que mucha gente no quiere, comprando coches más antiguos que no tienen ese sistema. Se puede creer en un sistema donde hay presidentes narcisos que dan la cara para hacer guerras y protegidos por sus grandes jefes poderosos a cambio de dinero y protección. También en supuestos expertos y tertulianos pagados para decir lo que quieren los poderosos. Se puede creer en una justicia que imputa a cientos, pero que después los deja libres porque están protegidos por los poderosos. Se puede creer en los libros, encuestas y datos para manipular las mentes de las personas. Se puede creer en lo que dicen los medios a través de todos los que salen, muy bien pagados para hacer creer a la gente lo que quieren los poderosos. Cierto es que creas o no los que tienen la fuerza de las armas imponen sus ideas en muchas ocasiones, da igual el sistema que haya. Cada cual puede creer o no, pero cuidado con las decisiones que tomes porque si que te pueden afectar psicológicamente, económicamente, en la salud y a otros niveles. Lo que sí creo es que los que se lo pasan muy bien, mejor que nunca, son los que dan las órdenes para cometer las fechorías y hacer creer a la gente otra cosa. Este siglo va está siendo el de mayor manipulación de masas y además de una forma descarada.
@Alex Y por cierto, que Vd diga que «mientras no se registren esos datos…», refiriéndose a las características de los vehículos involucrados en los accidentes, y a otros datos igualmente relevantes ¿De verdad cree Vd que las entidades aseguradoras no registran todos esos detalles, para elaborar bases de datos, y estadísticas realmente prácticas, para conocer las auténticas causas de los accidentes, y así calcular de forma más óptima, sus primas de seguros?
¿Por qué cree Vd que las autoridades públicas no se atreven a requerir toda esa información a las aseguradoras, para informar muchísimo mejor a la ciudadanía, sobre las causas de la siniestralidad vial?
Pá Vds. la perra gorda, que tienen mucho tiempo libre para conspiraciones judeo masónicas comunistas.
«Democracy dies in darkness»
@Alex ¿Vd está a favor de la transparencia informativa, en todos los ámbitos de la actividad humana, necesaria para el progreso y la justicia social, la equidad económica, y el avance democrático, o defiende justo lo contrario?
Le recomiendo un libro y se contesta Vd. solo. «Breve tratado sobre la estupidez humana».
Pues claro que estoy a favor de la transparencia informativa, pero mas que la transparencia me preocupa el tratamiento de la información.
Que el día tiene 24 horas, 8 para dormir, 8 para currar, luego está la casa, los críos, la pareja, el deporte……… y por eso hay que buscar muy bien donde nos informamos.
Oiga, ¿sabe Vd. que el ser humano realmente no fue a la Luna?.
🙂
Lo importante es hacer creer a la gente lo que quieren los que tienen el poder. De esa forma se domina a la gente para que piense, opine, decida lo que ellos quieren. Es un poder muy grande y hacen guerras por tenerlo los poderosos. Dominar a la gente, dominar lo que piensan, dominar sus actos, es como programar un robot o una máquina.
Por eso las informaciones, las estadísticas, los datos, las imágenes, videos…siempre estarán destinados a manipular.
En resumen, la idea de que los datos importantes se ocultan está ligada a la crítica sobre cómo la industria de las noticias selecciona y presenta la realidad, lo que genera una brecha entre la información difundida y la información completa. Censura de origen, es la mayor censura que se puede hacer, acompañada de estrategia para manipular personas.
Hay personas que pasan toda su vida creyéndose todo lo que sale en los medios. Pero cada vez hay menos, porque pienso que la gente está espabilando a base de golpes que están recibiendo.
Siempre habrá un pequeño porcentaje que defienda a los medios, y la mayoría de ellos son porque tienen intereses económicos. Solo por dinero, money, money, money…
@Alex Aclárese, por favor ¿Vd defiende la publicación de bases de datos de siniestralidad (del estilo de la base de datos de siniestralidad BAAC, del observatorio francés ONISR, que está abierta al público general), correspondiente a las últimas décadas, pero incluyendo también las características técnicas de los vehículos involucrados (ADAS, ESP, ABS, airbags…; rangos de peso, de distancia entre ejes, de anchura de vías, de altura, de potencia; tipo de tracción…), para que la ciudadanía pueda comprobar por sí misma, las bondades de cada «categoría de vehículo», y de cada dispositivo de seguridad, o por contra, sigue considerando que ya hay «información de sobra» al respecto, como afirmaba en su comentario @31?
@vicente, es vd peor que un dolor de muelas. Pero no solo por pesado, sino por pensar que vd va a hacer el trabajo de miles de profesionales en una tarde.
Venga, se lo doy hecho. Busque GIDAS y callese de una puta vez. Bueno, no, analicelo TODO y despues nos explica sus conclusiones.
@46 En la página web del observatorio francés ONISR, en la pestaña «instrumentos estadísticos», se puede seleccionar la opción «creo mi tabla» según ciertas variables disponibles (aunque las variables relativas a los rangos de características técnicas de los vehículos involucrados, como su peso, longitud, distancia entre ejes, anchura, altura, potencia, tipo de tracción, así como su equipamiento de seguridad, ABS, ESP, airbags, ADAS… no están disponibles, y resulta muy poco práctica para comparar el auténtico «nivel de seguridad» de cada tipo de vehículo, en la realidad de las vías públicas).
Tras revisar la página web de GIDAS (.org), no he encontrado el modo de acceder a su base de datos de siniestralidad, para realizar consultas similares. Si es posible realizar búsquedas en dicha base de datos (en el caso de que sea pública), le agradecería me indique cómo hacerlo.
@Alex ¿Vd cree que la DGT española, está al nivel de transparencia del observatorio francés ONISR, y sigue considerando que hay «información de sobra» de dominio público, en lo que respecta a la siniestralidad vial, en todos los países de la UE, que justifiquen la implementación obligatoria de las actuales ADAS?