
En la última década, algunos de los Sistemas Avanzados de Asistencia a la Conducción, también conocidos como ADAS, han pasado de ser un equipamiento de lujo a convertirse en un estándar obligatorio en los vehículos nuevos vendidos en la Unión Europea. Entre ellos, el Asistente de Frenada de Emergencia (AEB) es, sin duda, uno de los más importantes. Sin embargo, su implementación no está exenta de retos técnicos.
Muchos conductores han experimentado alguna vez una alerta sonora o, en el peor de los casos, un frenazo brusco sin obstáculo aparente. Para entender por qué ocurre esto, es necesario analizar cómo ve el coche su entorno y cuáles son los límites actuales de esta tecnología.
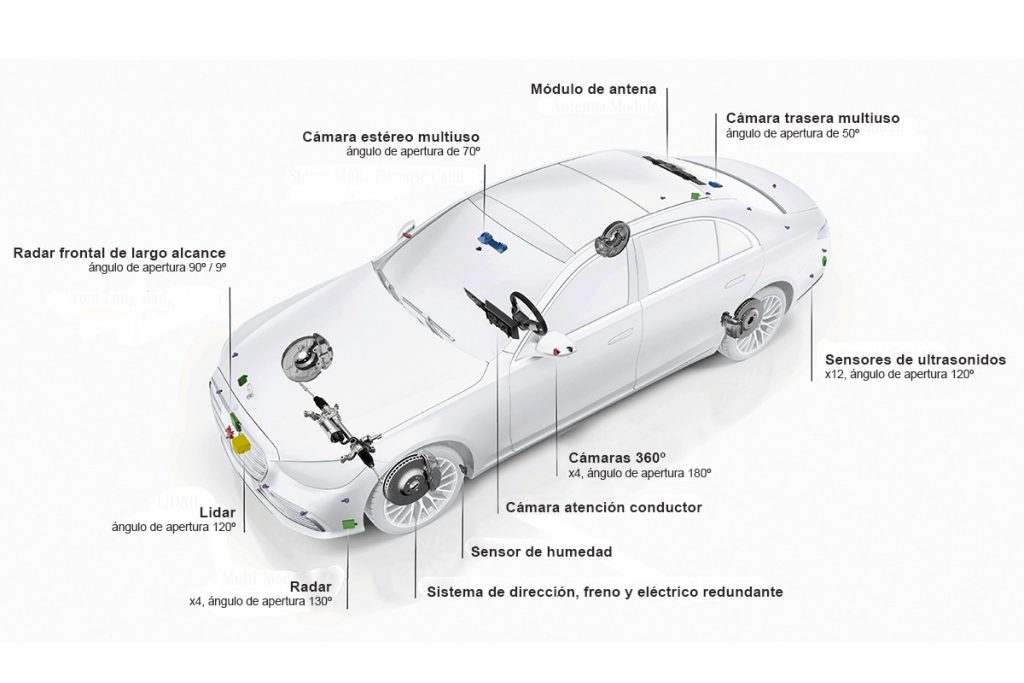
En la mayoría de vehículos el Asistente de Frenada de Emergencia funciona con una fusión de sensores. Esto significa que combinan la información de un radar (generalmente ubicado tras la calandra delantera) y una o varias cámaras (situadas en la parte superior del parabrisas, normalmente en el centro de la luna). En algunos sistemas más avanzados, especialmente en vehículos de gama alta, también puede emplearse lidar, un sensor basado en láser que permite obtener una representación tridimensional muy precisa del entorno.
El radar es excelente midiendo distancias y velocidades relativas, incluso en condiciones de baja visibilidad, pero tiene poca resolución para distinguir formas. La cámara, por su parte, es capaz de clasificar objetos según si es peatón, ciclista o coche, pero es más sensible a las condiciones de luz y clima. El problema aparece cuando la interpretación de estos datos genera un conflicto en el algoritmo central.
Limitaciones y errores
Uno de los motivos menos frecuentes, pero técnicamente posibles, por los que un coche puede detectar un riesgo inexistente es el fenómeno de las reflexiones múltiples del radar. Este sensor emite ondas que rebotan en los objetos y regresan al receptor, pero en determinadas situaciones —como curvas cerradas, túneles o entornos con estructuras metálicas— esas ondas pueden reflejarse en varias superficies antes de volver. Esto puede generar lo que se conoce como «objetivos fantasma», es decir, detecciones que no corresponden a un obstáculo real en la trayectoria del vehículo.
Aunque los sistemas modernos incorporan algoritmos avanzados para filtrar este tipo de errores (mediante seguimiento temporal y coherencia física de los objetos) en escenarios complejos pueden persistir ambigüedades que contribuyen a una detección incorrecta
Por otro lado, la cámara también puede equivocarse. Las sombras proyectadas por edificios o árboles bajo un sol muy bajo pueden crear contrastes que el software de procesamiento de imágenes confunde con obstáculos físicos. Del mismo modo, el vapor de agua que sale de los escapes en invierno o el polvo en suspensión pueden ser interpretados como objetos sólidos si el sistema no está correctamente calibrado. Cuando el radar detecta un «eco metálico» y la cámara, debido a una sombra o un deslumbramiento, no puede descartar con total seguridad que haya algo allí, el sistema suele priorizar la seguridad y lanzar una advertencia o activar los frenos.
Funcionamiento del algoritmo
La ingeniería de estos sistemas se enfrenta a un dilema constante en términos de sensibilidad. Si el sistema es muy poco sensible, corre el riesgo de no activarse ante un atropello real, en lo que se conoce como un falso negativo. Si es demasiado sensible, generará alertas constantes ante cualquier sombra o bache, dando lugar a falsos positivos.
Los fabricantes suelen programar los sistemas de modo que tiendan más a ser conservadores. Desde el punto de vista de la responsabilidad y la seguridad, es preferible que el coche dé una alarma innecesaria a que falle en una situación crítica. No obstante, esto genera lo que los expertos llaman fatiga de alerta: si un conductor recibe demasiados avisos falsos, acaba desconectando el sistema o ignorándolo, lo que tira por la borda su beneficio preventivo.
Además, el comportamiento humano es difícil de modelar para un ordenador. Un conductor experimentado puede anticipar que un coche que está girando en una calle lateral va a despejar el carril a tiempo, pero el algoritmo del coche, basándose estrictamente en la trayectoria y la velocidad actual de ambos vehículos, puede calcular una colisión inminente y aplicar los frenos de forma preventiva. Aunque los sistemas modernos intentan predecir trayectorias, aún tienen dificultades en escenarios ambiguos: es lo que todavía diferencia la percepción de una máquina de la de un humano.
Es interesante, gracias.
He tenido una experiencia que he logrado reproducir y que tiene más que ver con predecir lo que va a hacer el conductor y con la interpretación del entorno. En una avenida de dos carriles por sentido y coches aparcados en fila, al acercarme a una calle trasversal pequeña por el carril derecho, esquivo un bache debido a una arqueta profunda, de manera que primero invado levemente el carril izquierdo (volante a la izquierda) y luego vuelvo al carril (volante a la derecha y después a la izquierda para retomar el carril derecho). Al hacer la maniobra, el coche por un momento se dirige al primer coche aparcado inmediatamente posterior a la calle trasversal. El volante en ese momento está pasando por el centro para finalmente girar a la izquierda y retomar el carril derecho. El peligro que yo percibí es nulo, pero la alerta salta (por suerte, sin intervención en la frenada).
Obviamente esto depende del modelo concreto, pero seguro que mucha gente acaba detectando este tipo de pequeños defectos.
Pues eso mismo me comentaba un familiar. Y le dije que ya se han cargado la conducción y el placer de conducir.
En algunos casos salen hadas y las cámaras las detectan y el coche se vuelve loco.
En teoría son unas ayudas que crearon para facilitar la conducción. Los fabricantes lo instalaron en algunos coches y después darían orden a los políticos europeos para que las impusieran obligatoriamente. Los políticos no tienen idea de esto. Habrá alguna excepción. Entonces vieron el negocio, que era aumentar los precios de todos los coches. Algún listillo, parásito, palmero les dió la idea y era una forma de unirse fabricantes y políticos para llenarse los bolsillos.
Deberían de desconectarse por completo o parcialmente.
La tecnología siempre ayuda a quién invierte. En algunos casos es positiva, pero en otros no. Ejemplo de drones para la guerra, bombas nucleares y todo tipo de armamento. También aumentan las producciones para que la gente vaya exprimida teniendo el mismo salario. Los despidos de las personas son brutales. En fin, todos sabemos que no siempre es positiva. Pero nadie dice ni hace nada.
Que las ADAS pueden ayudar, pues sí. Pero el dueño del coche debería de elegir su conexión o no. Pero claro, entonces se les va el negocio, los beneficios, las comisiones y la riqueza.
Si no quieres ADAS te tienes que comprar un coche de segunda mano que sea libre y no se las hayan puesto. O simplemente no comprar coche y te ahorras un dinero al año. Cada vez hay más gente que vende su coche y ya no compra. Es lo que consiguen. Y aumentan las ventas porque en todos los países han venido millones de personas. Pero sin ADAS aumentarían mucho más.
Pero cuántas historias inventan para subir precios…
Lo venden como que es para ayudar y es para enriquecerse y encima marear al personal.
Lqs ADAS deberían ser todas opcionales… y para que sean obligatorias, debería haberse abierto previamente un debate público, con expertos que difundan toda la casuística accidental hasta la fecha, comparando accidentes análogos, en los que estén involucrados vehículos con y sin cierto dispositivo de seguridad.
Una vez que todas estas bases de datos de accidentes fueran de dominio público (convenientemente anonimizadas, por supuesto), debería haberse consultado a la población acerca de la obligatoriedad de las ADAS.
Y este mismo proceso de transparencia debería haberse aplicado a todos los demás equipamientos de seguridad (cinturones de seguridad, airbags, ABS, ESP…), si de verdad vivimos en sociedades avanzadas y democráticas.