Glosario | Detección de vehículos en ángulo muerto
El sistema de detección de vehículos en ángulo muerto tiene como objetivo alertar al conductor si hay otro vehículo en el ángulo muerto de los retrovisores o cerca de él.
Para ello, consta de sensores que vigilan constantemente la zona lateral próxima al coche. Generalmente bien son sensores radar de corto o medio alcance a 24 GHz, o bien sistemas de procesado de imágenes. Estos sensores proporcionan información a una centralita de control que, en caso necesario, emite un aviso acústico, visual o táctil (o una combinación de varios).
Existen sistemas que pueden alertar de forma continua de la existencia de vehículos en el ángulo muerto independientemente de las intenciones del conductor, mientras que otros únicamente actúan cuando se expresa la voluntad de efectuar un cambio de carril mediante el uso del intermitente.
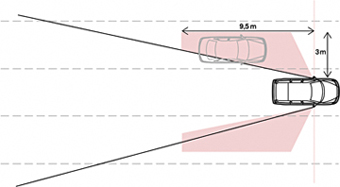
Con el objetivo de minimizar las falsas alarmas, generalmente actúan por encima de un umbral de velocidad determinado y son capaces de realizar un filtrado de vehículos estacionados o de aquellos que circulan en sentido contrario. La zona de detección es unos 10 metros por detrás del espejo retrovisor por unos 4 de anchura, suficiente para cubrir el ángulo muerto.
El primer vehículo en integrar el sistema de detección de objetos en ángulo muerto fue el Volvo XC90 (Otoño 2005), utilizando para ello un par de cámaras CMOS integradas en los espejos retrovisores exteriores.
 |  |
El Audi Q7 fue el pionero en la utilización de un sistema de asistencia al cambio de carril, mediante el uso de dos radares de medio alcance ubicados en las esquinas del paragolpes posterior.

